
About myself

Hello! My name is Kevin Paulose and I am a graduate student pursuing
Robotics and Mechatronics at
the
University of Pennsylania and
expect to
graduate in May 2025.
Since childhood, my heart's been captivated by robots and rockets, igniting a
passion that drives me to make my mark in the thrilling world of robotics
🤖
I focus on localization, motion planning, and controls, with experience in working
on autonomous vehicles and unmanned aerial vehicles.
The trifecta of coding, tinkering, and gymming is my vibe! 🦾
TL;DR? Self Proclamations:
Roboticist
Researcher
Nerd
Swimmer
Experience
I am working with the The Autoware Foundation where I deployed a custom end-to-end Eve Autonomy autonomous kart, one of one in the US.
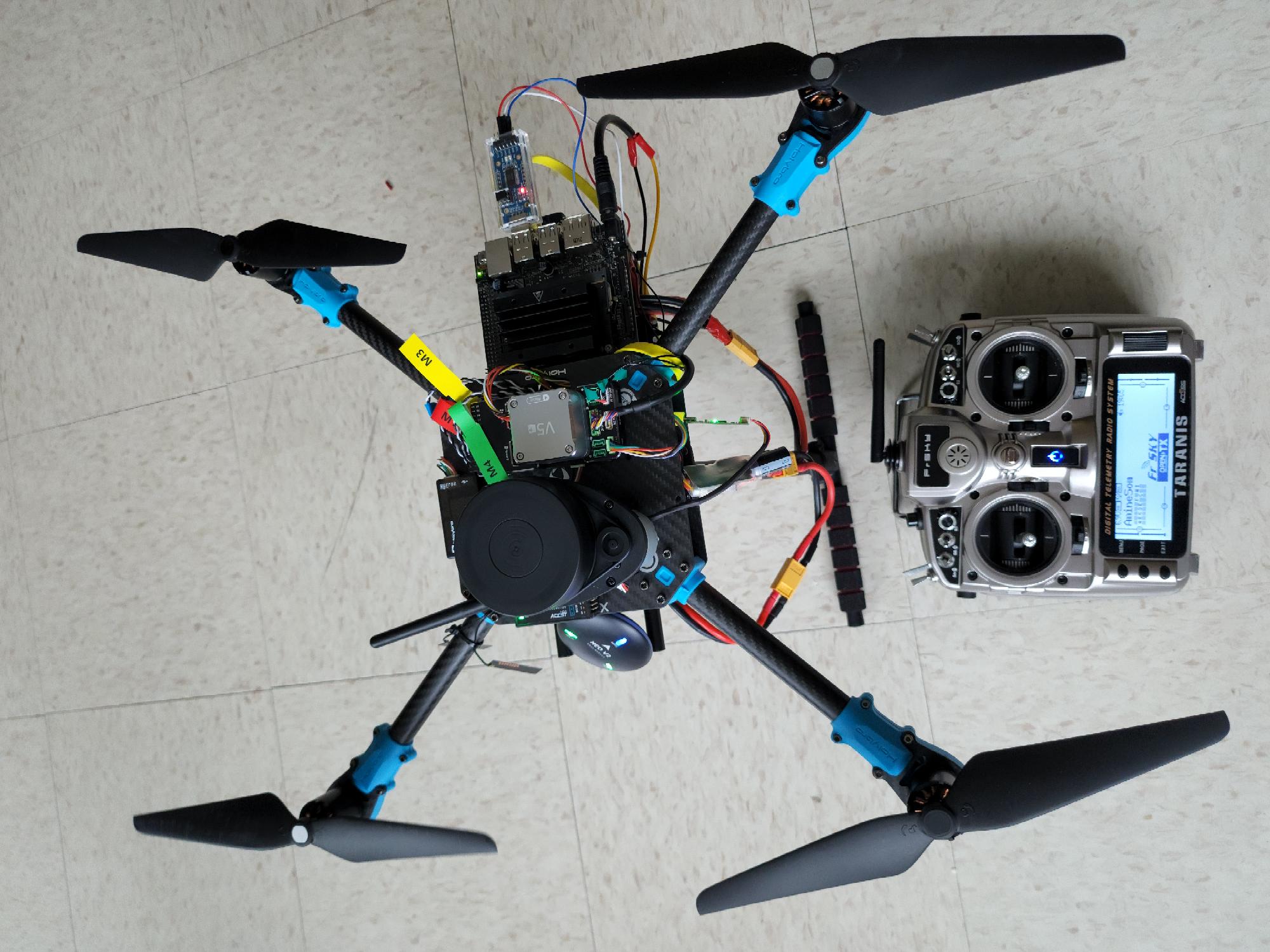
I have worked with obstacle avoidance in drones at Université du Québec en Outaouais, Canada and topology optimization in additive manufacturing at Bhabha Atomic Research Centre (BARC)
.

I have also spearheaded a flagship product aimed to support software developers- Crio Projects Hub at Crio.Do.

Some technologies I've worked with:




























{kind=link}